树和图
树是一种特殊的图,无环连通图。
图的话分为两种,有向图(a->b)和无向图(a<->b),无向图是一种特殊的有向图,所以只需要考虑有向图就行。
有向图的存储分为两种,第一种是邻接矩阵(g[a][b]二维数组),空间复杂度比较高$O(n^2)$,有权重的话g[a][b]指的是权重,无权重的话就是bool值,表示有边或者无边。比较适合存储稠密图
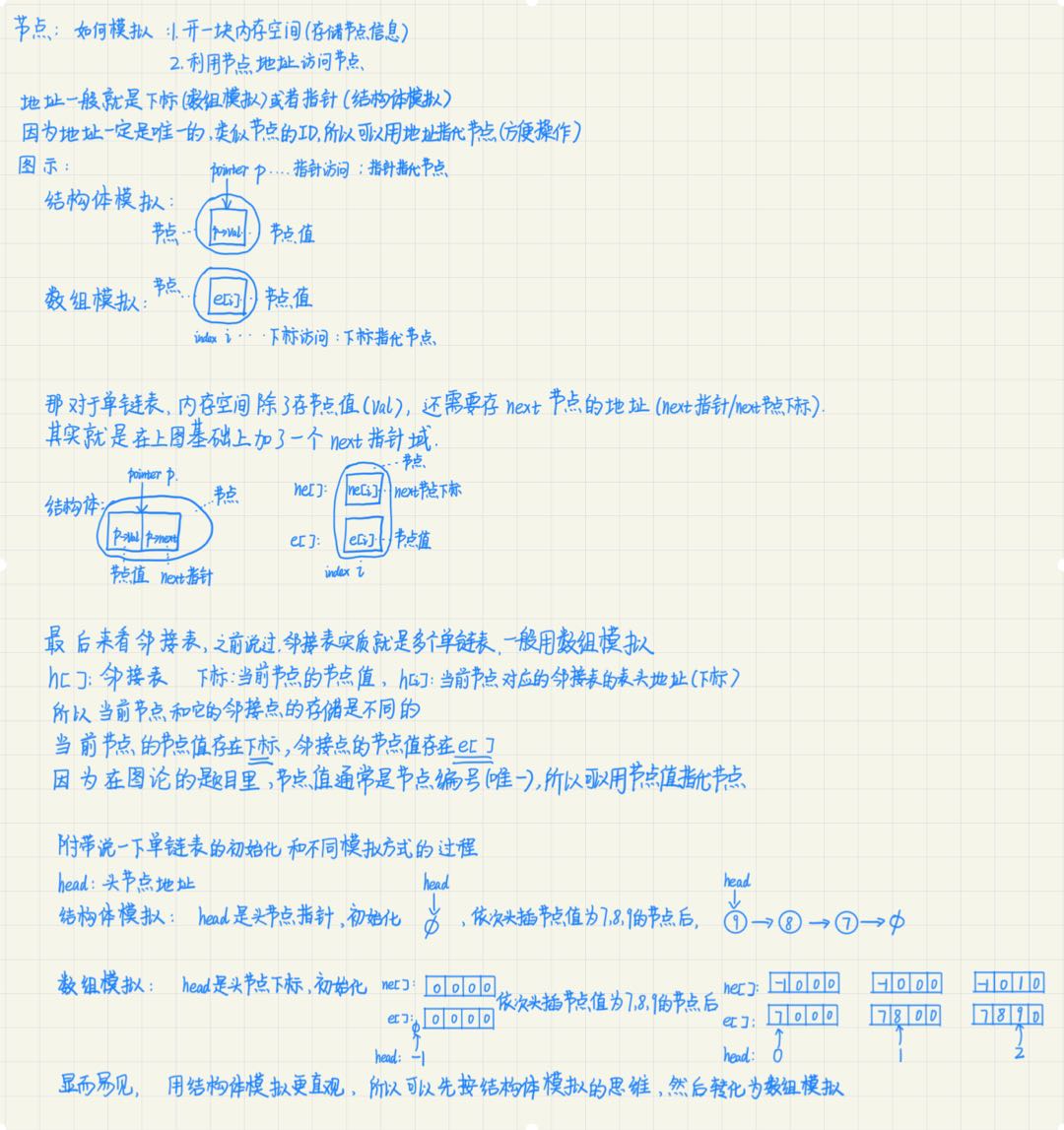
另一种是邻接表(其实就是每个节点开个单链表),存这个点可以走到哪个点,次序是无关的,插入节点是用头插法
树与图的深度优先遍历 首先我们要明确一个概念,那就是树是一种特殊的图,也就是无环连通图。
然后对于树我们一般用邻接表来存,邻接表其实就是多个单链表。
关于节点,链表,邻接表,以及如何用邻接表表示树,这其中涉及到的概念很容易混淆,我们在这里进行详细的解读
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 int i: 节点下标i,指向一个节点,简称 i的节点(不固定,因为下标会变)
Reference [1]. 当前节点和邻接点的图示 [2]. 邻接表存储细节的详解
基本思路 首先我们要知道怎么找到树的重心,就是搜索每一个点,求删除该节点后的连通块中点数的最大值(简称连通块最大值),对应连通块最大值最小的那个节点就是树的重心
搜索树里的每一个点,显然用DFS或者是BFS
然后我们需要求每个节点的连通块最大值,对于每个节点的连通块最大值,我们要求每个节点的所有邻接点的连通块的值。
所以我们找到了突破口,下面部分的邻接点的连通块值,实际就是邻接点为根节点的树的大小(很明显求很多个节点为根节点的树的xxx用DFS递归)
然后我们DFS函数定义就是节点u的连通块最大值,在函数里面,我们先求u下面的连通块最大值,也就是遍历u所有下方邻接点得到连通块的值(实质就是以邻接点为根节点的子树大小)
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 #include <iostream> #include <algorithm> #include <cstring> using namespace std;const int N = 1e5 + 10 ; const int M = 2 * N; int h[N]; int e[M]; int ne[M]; int idx; int n; int ans = N; bool st[N]; void add (int a, int b) int dfs (int u) int res = 0 ; true ; int sum = 1 ; for (int i = h[u]; i != -1 ; i = ne[i]) {int j = e[i];if (!st[j]) {int s = dfs (j); max (res, s); max (res, n - sum); min (res, ans); return sum;int main () memset (h, -1 , sizeof h); for (int i = 0 ; i < n - 1 ; i++) {int a, b;add (a, b), add (b, a); dfs (1 ); return 0 ;
Reference [1]. yxc [2]. 松鼠爱葡萄 [3]. 对邻接表存储细节的详解 [4]. Bug-Free [5]. 最详细的题解–易懂 [6]. yx
树与图的广度优先遍历 基本思路 求最短距离,并且每条边的权重一样,所以可以用BFS
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 #include <cstring> #include <iostream> using namespace std;const int N=1e5 +10 ;int h[N], e[N], idx, ne[N]; int d[N]; int n, m; int q[N]; void add (int a, int b) int bfs () int hh=0 ,tt=0 ;0 ]=1 ; memset (d,-1 ,sizeof d);1 ]=0 ; while (hh<=tt)int t=q[hh++];for (int i=h[t];i!=-1 ;i=ne[i])int j=e[i];if (d[j]==-1 )1 ; return d[n];int main () memset (h,-1 ,sizeof h);for (int i=0 ;i<m;i++)int a,b;add (a,b);bfs ()<<endl;
Reference [1]. 847. 图中点的层次 [2]. 图中点的层次 详细注释 [3]. 真正本题需要实现的核心代码只有6句! [4]. Bug-Free
拓扑排序 首先我们需要明确一个概念叫拓扑序列:一张图的所有边 的前后关系可以用一个线性序列 来简化表示(其实就是省略了一些边的信息)一张图可能存在多个拓扑序列
如果图里存在还,就无法表示成线性序列,所以有环就没有拓扑序列
总结:
无向图,有向有还图没有拓扑序列,而有向无环图必然存在拓扑序列
拓扑序列只有从前向后的边,没有从后向前的边
基本思路 拓扑序列只有从前向后的边,没有从后向前的边
根据这个性质。我们只要每次放入队列的都是入度为0的点,那就一定满足都是从前向后的边
队列维护
将所有入度为0的点入队
删除这些点和他们的出边
循环上面的步骤
比较队列和图中点的数量
和BFS过程十分类似
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 #include <iostream> #include <cstring> #include <algorithm> using namespace std;const int N=100010 ;int h[N],e[N],ne[N],idx;int n,m;int q[N],d[N];void add (int a,int b) bool topsort () int hh=0 ,tt=-1 ;for (int i=1 ;i<=n;i++)if (!d[i]) while (hh<=tt)int t=q[hh++];for (int i=h[t];i!=-1 ;i=ne[i])int j=e[i];if (d[j]==0 )return tt==n-1 ;int main () memset (h,-1 ,sizeof (h));for (int i=0 ;i<m;i++)int a,b;scanf ("%d%d" ,&a,&b);add (a,b);if (topsort ()) for (int i=0 ;i<n;i++)printf ("%d " ,q[i]);puts ("" );else puts ("-1" );return 0 ;
Reference [1]. yxc [2]. E.lena [3]. 思路介绍+图解模拟+详细代码注释 [4]. Bug-Free [5]. 注释
最短路问题 最短路问题是图论里比较重要的篇章,下面简要的给单源最短路的相关算法的应用场景分一个类
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |-------朴素dijkstra算法 O(n^2) | | |------所有边权都是正数--- | | | |-------堆优化的Dijkstra算法 O(mlogn) 单源最短路 | |-------Bellman-ford O(nm) | | | |-----存在负权边--------- | |-------SPFA 一般O(m), 最坏O(nm)
然后再介绍一下稠密图和稀疏图的概念:(n为点数,m为边数)
所以基本上SPFA可以解决 所有问题,但是有两个限制
如果对边数做了限制,那就只能用Bellman-ford
如果正权边的题目卡SPFA,把它变成了最坏情况O(mn),那就用Dijkstra算法
Dijkstra 基本思路 图论的题目,首先都要看看数据范围,确定是稀疏图还是稠密图,然后选择合适的存储方式
这里m和n^2是一个级别,所以是稠密图,我们选择朴素的Dijkstra算法和邻接矩阵来存图
朴素的Digkstra算法基本流程如下:
1 2 3 4 5 6 // dis[i] 是i号节点到源点的距离,st为True表示在 S集合:存储当前已经确定最短距离的点)1 . 初始化dis[1 ] = 0 , dis[i] = INF, st[1 ] = True2 . for i: i ~ n: // n // O(n)// O(1 )// O(n)
时间复杂度:$O(n^2)$
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 #include <iostream> #include <algorithm> #include <cstring> using namespace std;const int N=510 ;int n,m;int dist[N],g[N][N];bool st[N];int dijkstra () memset (dist,0x3f ,sizeof (dist));1 ]=0 ;for (int i=1 ;i<n;i++)int t=-1 ;for (int j=1 ;j<=n;j++)if (!st[j]&&(t==-1 ||dist[t]>dist[j]))true ;for (int j=1 ;j<=n;j++)min (dist[j],dist[t]+g[t][j]);if (dist[n]==0x3f3f3f3f ) return -1 ;else return dist[n];int main () memset (g,0x3f ,sizeof (g));while (m--)int a,b,c;scanf ("%d%d%d" ,&a,&b,&c);min (g[a][b],c);int t=dijkstra ();printf ("%d\n" ,t);return 0 ;
Reference [1]. yxc [2]. 超级详细的题解 [3]. E.lena [4]. 两点小解释 [5]. 注意 [6]. 松鼠爱葡萄
基本思路 还是先观察数据范围,这里m和n是一个级别,所以是稀疏图,我们选择堆优化的Dijkstra算法和邻接表来存图
堆优化的Digkstra算法基本流程如下:
1 2 3 4 5 1. 初始化dis [ 1 ] = 0 , dis [ i ] = INF , st [ 1 ] = True 2. while ( heap . size ( ) ) : t <- 不在s 中的距离源点最近的点( 直接取小根堆的堆顶) // 总共n 次,每次O ( 1 ) , O ( n ) s <- t // 总共n 次,每次O ( 1 ) , O ( n ) t 更新其他点的距离(更新需要将更新后的值插入堆里) // 最多m 次,每次O ( logn ) 手写堆 或者O ( logm ) 优先队列, 这两者只有常数级变化,O ( mlogn )
时间复杂度:$O(mlogn)$
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 #include <cstring> #include <iostream> #include <algorithm> #include <queue> using namespace std;typedef pair<int , int > PII;const int N = 1e6 + 10 ;int n, m;int h[N], w[N], e[N], ne[N], idx; int dist[N];bool st[N];void add (int a, int b, int c) int dijkstra () memset (dist, 0x3f , sizeof dist);1 ] = 0 ;push ({0 , 1 });while (heap.size ())auto t = heap.top ();pop ();int ver = t.second, distance = t.first;if (st[ver]) continue ;true ;for (int i = h[ver]; i != -1 ; i = ne[i])int j = e[i];if (dist[j] > dist[ver] + w[i])push ({dist[j], j});if (dist[n] == 0x3f3f3f3f ) return -1 ;return dist[n];int main () scanf ("%d%d" , &n, &m);memset (h, -1 , sizeof h);while (m -- )int a, b, c;scanf ("%d%d%d" , &a, &b, &c);add (a, b, c);dijkstra () << endl;return 0 ;
Reference [1]. yxc [2]. 小呆呆 [3]. 松鼠爱葡萄 [4]. E.lena [5]. 深入理解st数组的作用 [6]. 使用stl邻接表 [7]. 用手写堆实现
Bellman-ford 基本思路 有负权边,并且有边数限制,所以我们用Bellman-ford算法,基本流程如下
1 2 3 4 for k次 :1. 备份2. for 所有边 a , b, w a min (dist[b], dist[a ] + w);
不管是有向图还是无向图,点的邻接点和点的出边是一一对应的!
循环结束后,对于所有边都满足三角不等式,dist[b] <= dist[a] + w
注意事项
备份是为了防止串联,串联后就有可能超出k的限制
最后答案可能为-1,所以不能用-1作为判断impossible的标识
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 #include <iostream> #include <algorithm> #include <cstring> using namespace std;const int N = 510 , M = 10010 , INF = 0x3f3f3f3f ;int n, m, k;int dist[N];int backup[N]; struct Edges {int a, b, w;int bellman_ford () memset (dist, 0x3f , sizeof dist);1 ] = 0 ;for (int i = 0 ; i < k; i ++ )memcpy (backup, dist, sizeof dist);for (int j = 0 ; j < m ; j ++ )int a = edges[j].a, b = edges[j].b, w = edges[j].w;min (dist[b], backup[a] + w);if (dist[n] > INF / 2 ) return INF;else return dist[n];int main () for (int i = 0 ; i < m; i ++ )int a, b, w;int t = bellman_ford ();if (t == INF) puts ("impossible" );else cout << t << endl;return 0 ;
Reference [1]. yxc [2]. 松鼠爱葡萄 [3]. backup详解 [4]. 模拟 [5]. 问题汇总
SPFA 基本思路 SPFA其实是队列优化后的Bellman-ford算法,优化了松弛的步骤dist[b] = min(dist[b], dist[a]+w)
基本流程如下:
1 2 3 4 5 6 queue <-- 1 1 . t <-- q .front q .pop 2 . 更新t的所有出边 t--w-- >b --b
代码和堆优化的Dijkstra代码非常相似
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 #include <iostream> #include <algorithm> #include <cstring> #include <queue> using namespace std;typedef pair<int , int > PII;const int N = 1e5 +10 , INF = 0x3f3f3f3f ;int n, m; int h[N], e[N], w[N], ne[N], idx; int dist[N]; bool st[N]; void add (int a, int b, int c) int spfa () memset (dist, 0x3f , sizeof dist);1 ] = 0 ; int > q; push (1 ); 1 ] = true ; while (q.size ())auto t = q.front (); q.pop (); false ; for (int i = h[t]; i != -1 ; i = ne[i]) int j = e[i]; if (dist[j] > dist[t] + w[i])if (!st[j]) push (j); true ; if (dist[n] == INF) return INF; return dist[n]; int main () memset (h, -1 , sizeof h); while (m--)int a, b, c;add (a, b, c);int t = spfa ();if (t == INF) puts ("impossible" );else cout << t << endl;return 0 ;
Reference [1]. yxc [2]. 队列优化的Bellman-Ford算法 [3]. 松鼠爱葡萄 [4]. Bug-Free [5]. 分析 [6]. 图解+详细代码注释spfa求最短路−−−图解+详细代码注释
基本思路 这里是利用spfa来判断负环,加上一个cnt数组表示点到源点的最短距离的边数
注意
dist数组不用初始化,因为如果有负环,最终这些点的距离肯定是负无穷,所以不需要初始化
因为要判断的是图里是否存在负环,可能负环路径没有出现在源点上,所以一开始把所有的点入队
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 #include <cstring> #include <iostream> #include <algorithm> #include <queue> using namespace std;const int N = 2010 , M = 10010 ;int n, m;int h[N], w[M], e[M], ne[M], idx;int dist[N], cnt[N];bool st[N];void add (int a, int b, int c) bool spfa () int > q;for (int i = 1 ; i <= n; i ++ )true ;push (i);while (q.size ())int t = q.front ();pop ();false ;for (int i = h[t]; i != -1 ; i = ne[i])int j = e[i];if (dist[j] > dist[t] + w[i])1 ;if (cnt[j] >= n) return true ;if (!st[j])push (j);true ;return false ;int main () scanf ("%d%d" , &n, &m);memset (h, -1 , sizeof h);while (m -- )int a, b, c;scanf ("%d%d%d" , &a, &b, &c);add (a, b, c);if (spfa ()) puts ("Yes" );else puts ("No" );return 0 ;
Reference [1]. yxc [2]. 小呆呆 [3]. Bug-Free [4]. 判断负环详解
Floyd 基本思路 多源最短路问题,一般就是用Floyd算法,它是基于动态规划的思想
状态表示:f[k][i][j] 表示经过前k个点从i到j的距离
状态计算:f[k][i][j] = f[k - 1][i][j] + f[k - 1][k][j] //划分为不经过k和经过k两部分
省略k这个维度,因为它只和k - 1有关
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 #include <iostream> using namespace std;const int N = 210 , M = 2e+10 , INF = 1e9 ;int n, m, k, x, y, z;int d[N][N];void floyd () for (int k = 1 ; k <= n; k++)for (int i = 1 ; i <= n; i++)for (int j = 1 ; j <= n; j++)min (d[i][j], d[i][k] + d[k][j]);int main () for (int i = 1 ; i <= n; i++)for (int j = 1 ; j <= n; j++)if (i == j) d[i][j] = 0 ;else d[i][j] = INF;while (m--) {min (d[x][y], z);floyd ();while (k--) {if (d[x][y] > INF/2 ) puts ("impossible" );else cout << d[x][y] << endl;return 0 ;
Reference [1]. yxc [2]. Floyd闫式dp分析法 [3]. Bug-Free [4]. 文字性复习
最小生成树 关于生成树和最小生成树的定义
为了求解最小生成树,我们常用的有Prim算法和Kruskal算法
Prim 朴素Prim算法基本流程如下:
1 2 3 4 5 1 . dist[i] = INF, dist[1] =0 2 . for i in 0 ..n-1
所以我们发现此算法跟Dijkstra算法非常相似
Dijkstra算法的t是距离源点最近的点,更新也是更新其他点到源点的距离
如果现在的距离为无穷大,那么说明没有最小生成树
基本思路 模板题,prim算法求解最小生成树,注意处理自环和重边
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 #include <cstring> #include <iostream> #include <algorithm> using namespace std;const int N = 510 , INF = 0x3f3f3f3f ;int n, m; int g[N][N]; int dist[N]; bool st[N]; int prim () memset (dist, 0x3f , sizeof dist); int res = 0 ;for (int i = 0 ; i < n; i ++ )int t = -1 ;for (int j = 1 ; j <= n; j ++ )if (!st[j] && (t == -1 || dist[t] > dist[j]))if (i && dist[t] == INF) return INF; if (i) res += dist[t]; true ; for (int j = 1 ; j <= n; j ++ ) dist[j] = min (dist[j], g[t][j]); return res; int main () scanf ("%d%d" , &n, &m);memset (g, 0x3f , sizeof g); while (m -- )int a, b, c;scanf ("%d%d%d" , &a, &b, &c);min (g[a][b], c);int t = prim ();if (t == INF) puts ("impossible" ); else printf ("%d\n" , t);return 0 ;
Reference [1]. yxc [2]. 课上详解 [3]. 边界条件和细节 [4]. Prim算法思想动图 [5]. 简要注释 [6]. 切分原理
Kruskal 基本思路 Kruskal算法流程:
1 2 3 4 1 . 将所有边按照权重从小到大排序 O (mlog (m))2 . 枚举每条边(a , b, 权重c) O (m)if a , b 两点不连通a , b边加入集合中
参考代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 #include <cstring> #include <iostream> #include <algorithm> using namespace std;const int N = 100010 , M = 200010 , INF = 0x3f3f3f3f ;int n, m; int p[N]; struct Edge int a, b, w;bool operator < (const Edge &W)const return w < W.w;int find (int x) if (p[x] != x) p[x] = find (p[x]);return p[x];int kruskal () sort (edges, edges + m);for (int i = 1 ; i <= n; i ++ ) p[i] = i; int res = 0 , cnt = 0 ;for (int i = 0 ; i < m; i ++ )int a = edges[i].a, b = edges[i].b, w = edges[i].w;find (a), b = find (b);if (a != b) if (cnt < n - 1 ) return INF; return res;int main () scanf ("%d%d" , &n, &m);for (int i = 0 ; i < m; i ++ ) int a, b, w;scanf ("%d%d%d" , &a, &b, &w);int t = kruskal ();if (t == INF) puts ("impossible" );else printf ("%d\n" , t);return 0 ;
Reference [1]. yxc [2]. 课上笔记详解 [3]. Kruskal算法思想gif图解 [4]. 朴素Prim算法+Kruskal算法 [5]. Bug-Free